Skills

C, C++, Python, Java
MATLAB, Simulink

Arduino, Raspberry Pi, ESP

CNC G-Code, PLC
ROS2, Gazebo, Isaac Sim
CATIA, KICAD, Fusion 360
NI-LabVIEW, DOPSOFT, WPLSOFT
ABB RobotStudio
Seshadripuram PU College
NMAM Institute of Technology, Nitte
C, C++, Python, Java
MATLAB, Simulink
Arduino, Raspberry Pi, ESP
CNC G-Code, PLC
ROS2, Gazebo, Isaac Sim
CATIA, KICAD, Fusion 360
NI-LabVIEW, DOPSOFT, WPLSOFT
ABB RobotStudio
Developed a differential drive mobile robot navigation system using ArUco markers. The system integrates Python and C for control and communication, with OpenCV for computer vision, differential drive kinematics and real-time navigation.
Source Code
Developed a mecanum mobile navigation system using ArUco markers. Used Python and C for control and communication, with OpenCV for computer vision, omnidirectional kinematics and real-time navigation
Source Code
Built a CNC pen plotter capable of drawing digital designs on paper with high accuracy. Customized the GRBL firmware to implement a reliable homing sequence for my design. Assembled the mechanical frame, wired motors, and fine-tuned the motion control parameters.
Source Code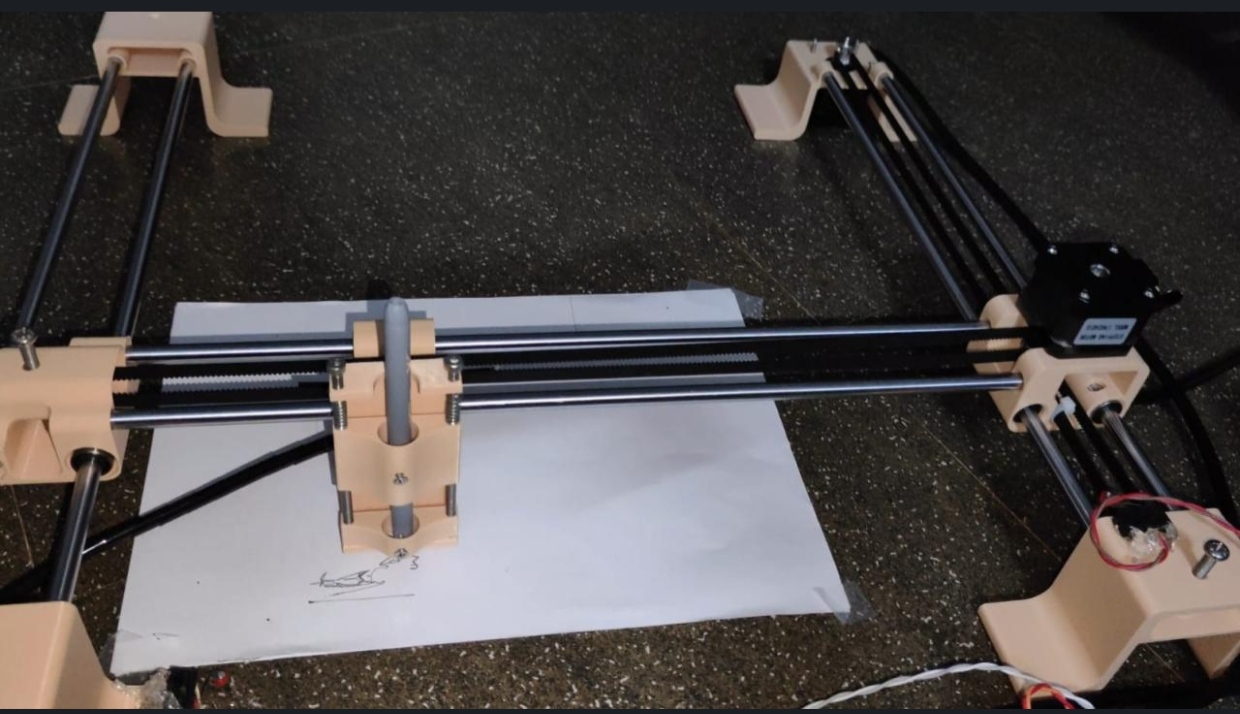
Built a 6-DOF robot arm based on the EB15 design from Toolbox Robotics. Handled full mechanical assembly, motor integration, and wiring. Developed control logic to manage all six joints and implemented a "record and playback" feature.
Source Code
Developed robot arm simulation software to visualize position, orientation, and home configuration. Demonstrated the effect of Denavit-Hartenberg (DH) parameters on robot structure and motion. Also implemented simple Inverse kinematics.
Source Code Download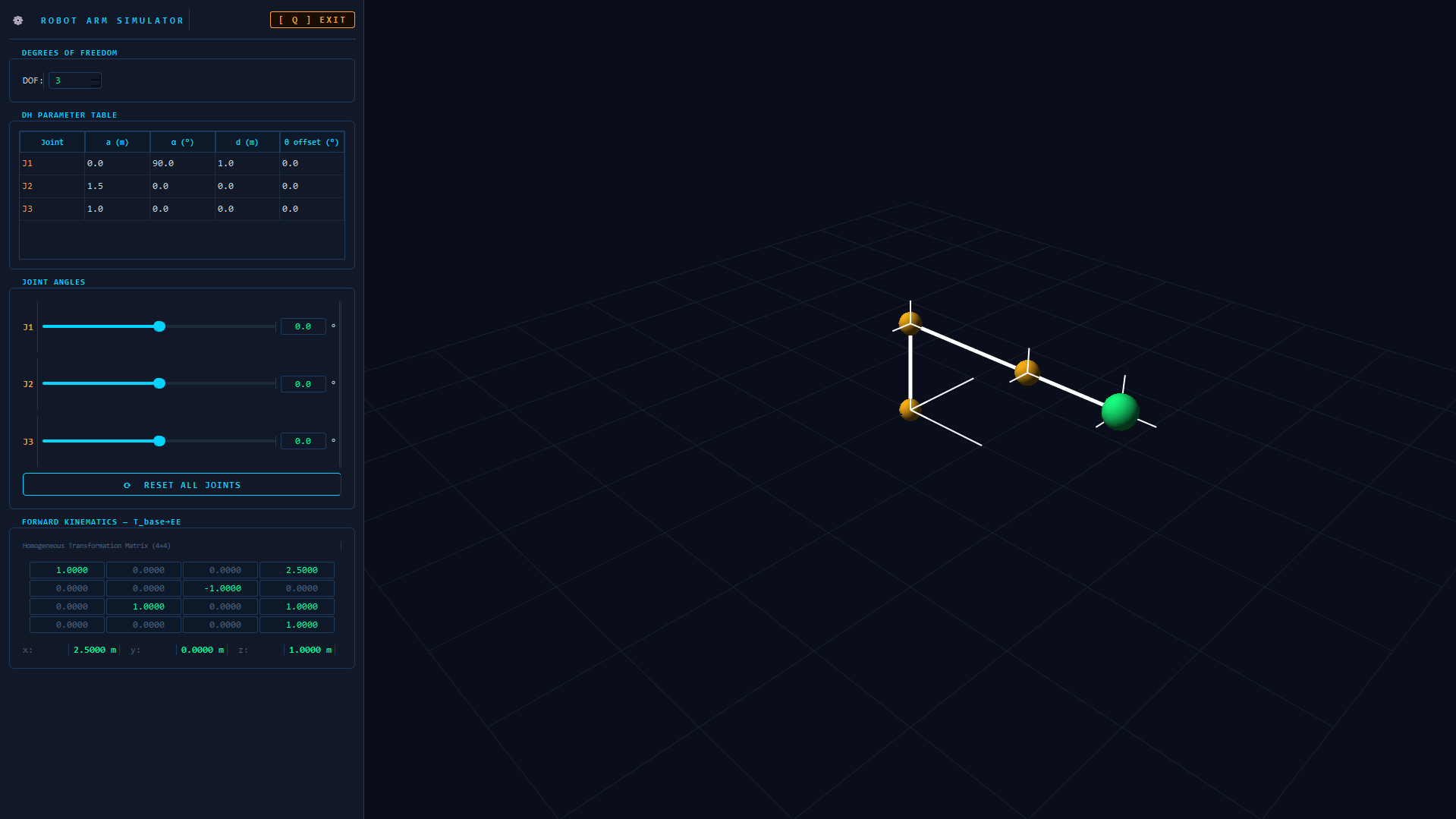
Developed image processing software that applies common techniques to input images. Users can select specific operations and save the processed output.
Source Code Download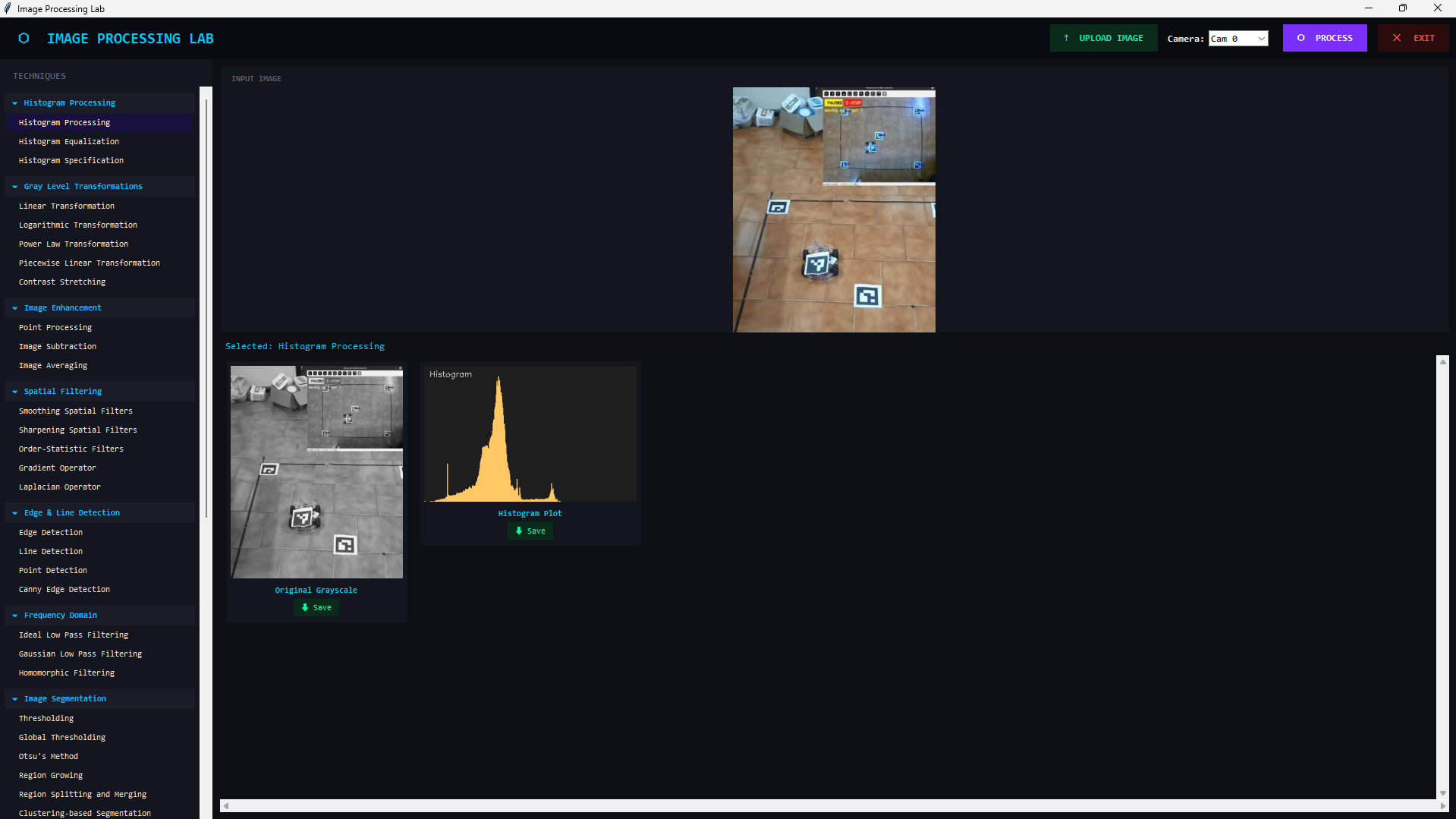
Developed Cobot arm simulation with several functions like "record and play", "move in a single axis", "home", "align to Z", etc..
Visit site (PC ONLY)